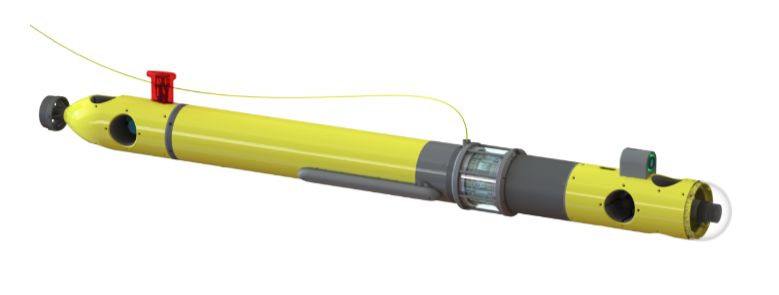
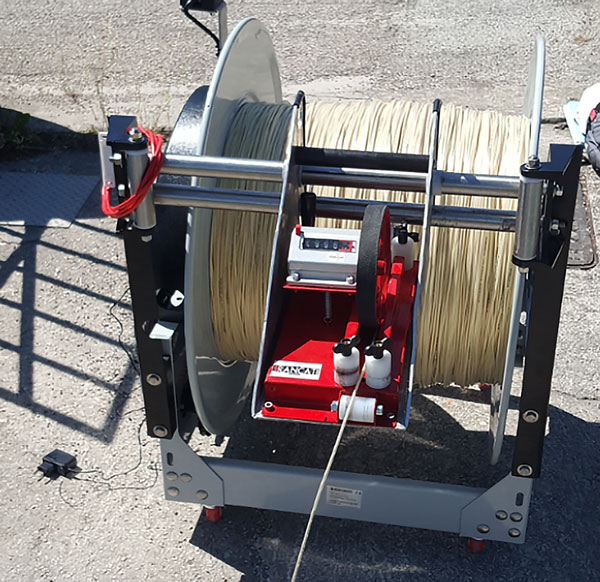
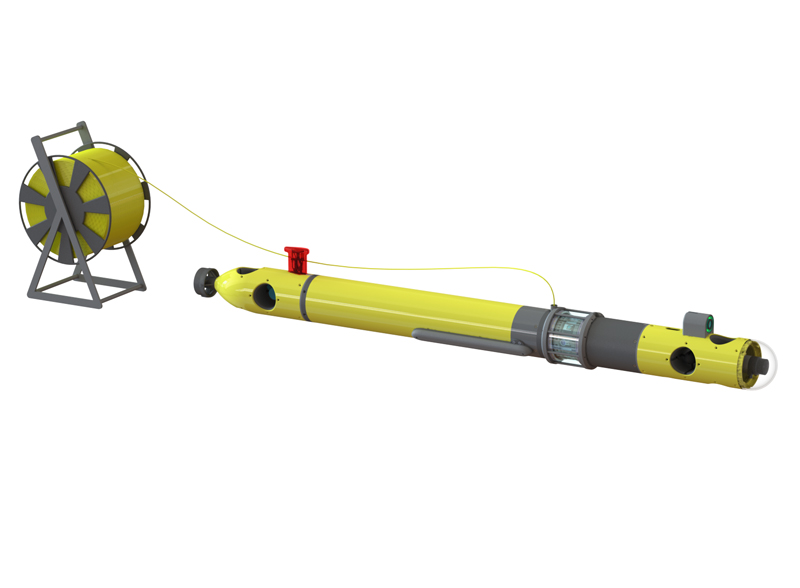
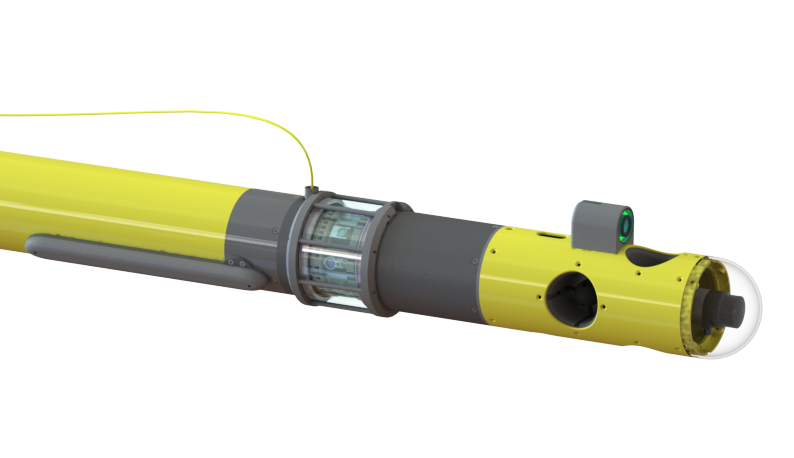
X-300 Explorer è dotato di un trasduttore interno che crea una connessione diretta fra la LAN all’interno dell’AUV e la rete PC all’interno del centro di controllo in superficie. In questo modo, non solo la CPU principale dell’AUV, ma anche tutti gli strumenti trasportati con un output Ethernet, come sonar e telecamere IP, diventano direttamente accessibili all’utente durante le missioni sottomarine. Il cavo può avere diverse lunghezze, fino a un massimo di 5 km. Per le lunghezze che superano il chilometro, si raccomanda l’ausilio di una ruota motorizzata, disponibile come optional.