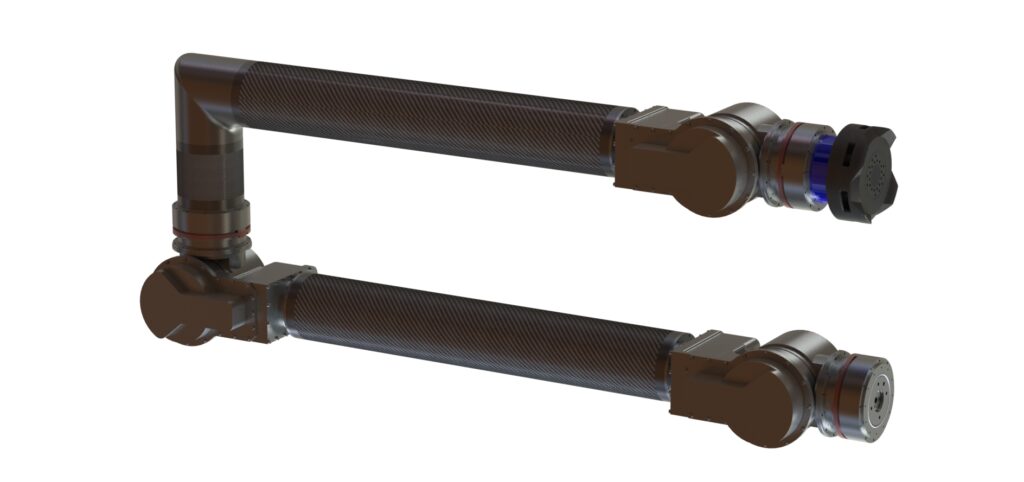
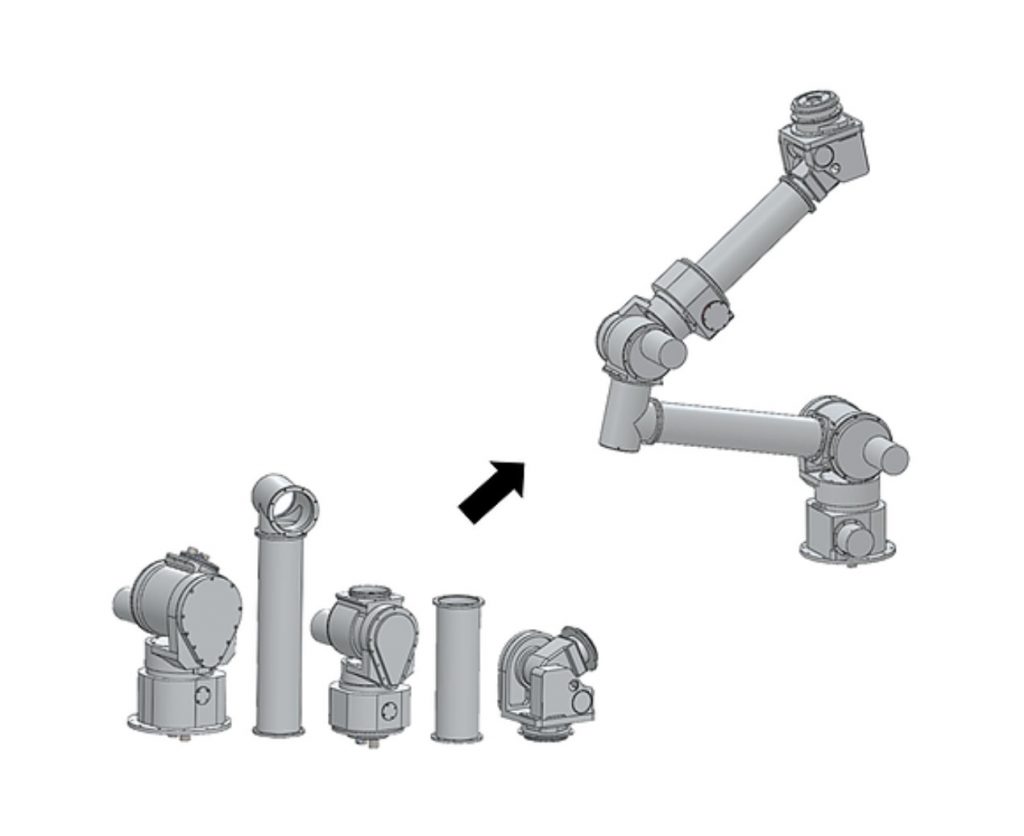
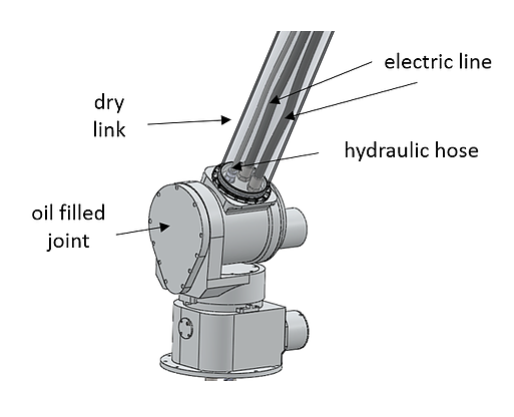
Come suggerisce il nome, UMA è un manipolatore robotico sottomarino realizzato adottando un approccio modulare. Gli elementi che lo compongono, i moduli di base, sono prodotti in Ergal, uno speciale strato di alluminio che permette di esibire proprietà favorevoli in termini di resistenza alla fatica e facile lavorabilità.
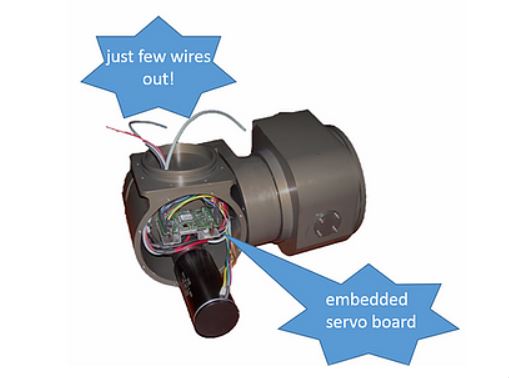
Tutti i movimenti dei robot sono generati da motori brushless guidati da un schede di controllo situate all’interno della struttura. La presenza di un livello di controllo incorporato facilita fortemente tutte le operazioni di inserimento, rimozione e sostituzione dei moduli di base.
La flessibilità intrinseca che deriva dal design modulare e la facile integrazione del manipolatore sui veicoli di supporto, rendono UMA una piattaforma robot versatile, capace di eseguire una vasta gamma di compiti di manipolazione applicabili al campo petrolifero, della difesa, dell’oceanografia e del monitoraggio ambientale.