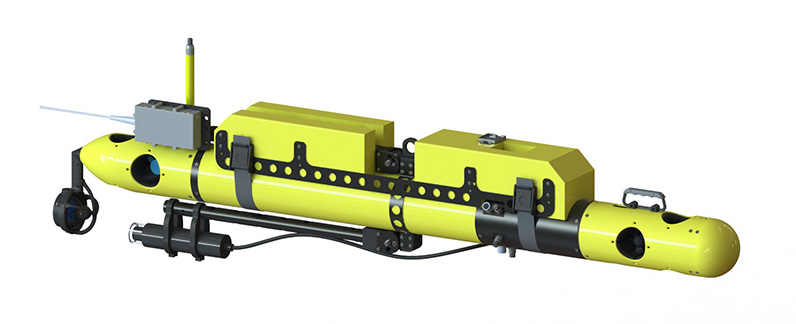
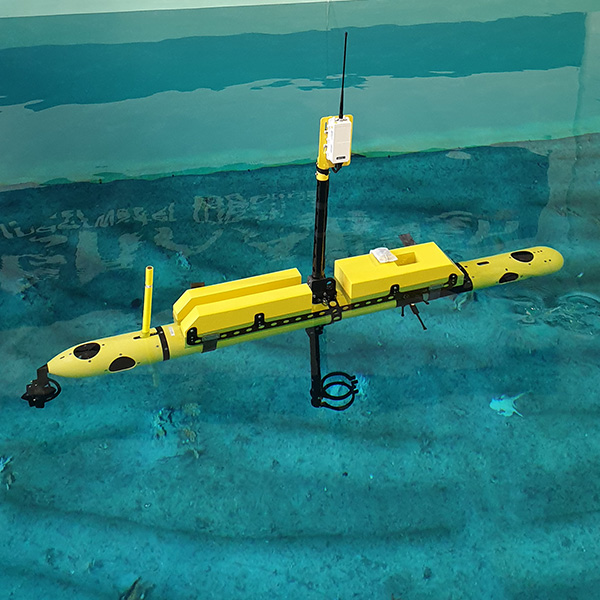
MGB-300 appartiene alla famiglia degli X-300. Fa parte dei veicoli di superficie autonomi (USV), è dotato di un sistema radio di lungo raggio e di un modem acustico. Quando viene usato in combinazione con uno o più AUV X-300, il robot MGB-300 può fungere da gateway dati fra i veicoli sottomarini e la stazione di controllo. Come il robot X-300, anche MGB-300 è caratterizzato da un’alta manovrabilità, dalla flessibilità della modularità di carico e da un sistema di controllo aperto che lo rendono una piattaforma unica, in grado di essere utilizzata in diverse tipologie di missione.